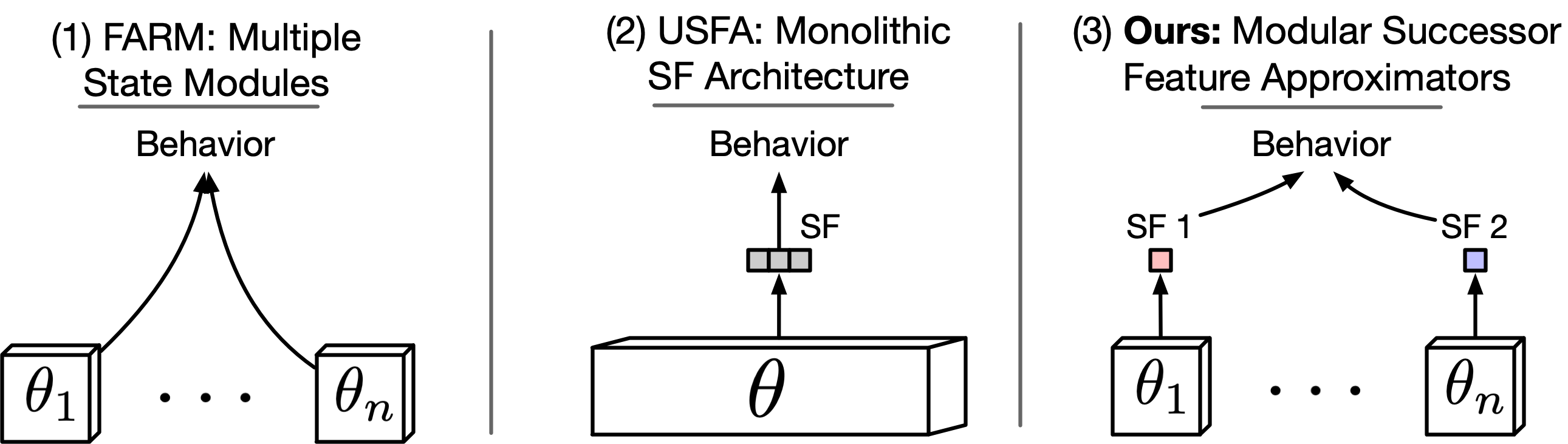
Prior work: Feature-Attending Recurrent Modules (FARM, 1) learns multiple state modules. This enables discovering useful state features in different modules and promotes generalization to novel environment configurations. However, it has no mechanism for combining task solutions. Universal Successor Feature Approximators (USFA, 2) learns a single monolothic architecture for predicing SFs and can combine task solutions. However, it relies on hand-designed state features and has no mechanism for generalization to novel environment configurations.
Modular Successor Feature Approximators: We combine the benefits of both We have modules that discover their own state features and learn their own SFs. This enables combining task solutions in the face of novel environment configurations.